
Modeling Gear-Shifting
Daniel Sazhin and John Bird
In the March issue of Soaring, we shared our analysis of risk in thermal soaring. We showed that pilots must maintain a target “strategic risk level” to avoid landing out in competitions. In order to maintain this risk level, pilots must balance the reliability and number of thermal options available when planning their flight path. If this combination is insufficient, the risk level goes up markedly. While these insights are already useful, we wanted to delve deeper by simulating risk management strategies. Moreover, we wanted to understand the concept of “gear-shifting”. In the end, we boiled down gear-shifting to choosing between two simple algorithms; one which is defined by choices which maximize speed (Racing) and the other which minimizes the risk of landing out (Risk-minimization). These form the key components of a concrete decision-making model for soaring pilots.
To build the model, we first had to define how pilots go about decision making. This is interesting in its own right as it requires understanding how people process information. For a cognitive scientist involved in soaring, it is ironic that pilots learn just about everything they could about their aircraft’s performance, flight computers and meteorology, and yet scarcely comprehend their own minds. Maximizing soaring performance requires optimizing the 100-watt biological computer between our ears as much as perfecting thermalling technique, final glides, and the sailplane’s finish.
The Brain as a Computer
To understand how people make decisions, we need to understand their internal software. The two pounds of biological matter we call the brain is an extraordinary computational unit with essentially unbounded long-term memory storage. Research has demonstrated that once memories are encoded into long-term memory, they don’t disappear. The reason we “forget” is that we lose our ability to consciously access those memories. Think about trying to locate something in a hoarder’s garage; it’s still there, but good luck finding it! Even if we are unable to access our memories, every flight, cloud, and thermal leaves its mark. Our minds use this experience to build a statistical representation of the atmosphere. We learn that certain clouds just have to have lift under them and others should be avoided like the plague. Through enough experience, it is possible to build a robust web of decision-making patterns that we can access with ease. It is through this process that we develop intuition.
On the other hand, our working memory is very limited, only about 50 bits. Working memory is what allows us to manipulate thoughts and ideas and to process abstract things. If I ask you to multiply 26 by 38 in your head, you will be using your working memory. Moreover, it allows us to question our intuitions and come up with unique solutions to problems. The limiting constraints to working memory are that it is slow and deliberate. This is a challenge for soaring pilots as the sky presents a massive amount of information but limited time to process all of it. Every cloud, bird, road, farm, and powerplant in our visual field is processed to assess where we’re likely to find our next thermal. It is simply overwhelming.
If you had a computer with very little RAM and an unlimited hard-drive, wouldn’t you want to take advantage of the hard-drive as much as possible? Cognitive scientists suspect that this is how our brain works. We outsource decision-making to long-term memory by preparing programs to deal with future situations. These cognitive shortcuts are called “heuristics”. A simple risk-related heuristic many beginners use is to “take every thermal” and “get high, stay high” while more-or-less heading toward their intended goal. Such a cognitive shortcut takes the overwhelming number of choices and boils them down to a simple actionable response; hit a thermal, take it!
As pilots get more experienced and become more efficient at cross-country soaring, they use multiple heuristics and apply them in sequence. This allows the human pilot to take the overwhelming number of clouds and other early visual cues and eliminate most of the “obviously” inefficient choices. For instance, pilots learn that deviating more than 30 degrees, taking weaker than average thermals, and under-flying MacCready speed can be quite costly for their average speed. If they omit all of these options, the number of options to choose from drops considerably. Often times, after running through this algorithm, only several possibilities or “lines” are left to consider in the sky ahead. It is in such a manner that experienced pilots “see” the line they need to take and the right choice is “self-evident”. This intuition is the product of experience and well tuned programs retrieved from their long term memory.
Decision-Making Frames
The problem from a risk-management perspective is an algorithm can work well in certain situations but not others. Flying MacCready speed and avoiding deviations works when there are plentiful and reliable thermals. However, when cirrus moves over, cumulus clouds overdevelop or a blue hole emerges, a prudent pilot would account for the changing atmosphere. In these cases, the risk of landing out is quite high. The pilot must change strategy and enter a “survival mode,” prioritizing avoiding an outlanding over all else. The pilot will maximize the number of clouds available, even making major deviations to reach more certain lift. Any thermal encountered is worth taking; the pilot won’t cry over taking a weak thermal for he is relieved to simply stay up.
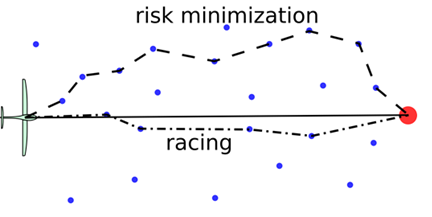
There seem to be two distinct algorithms or “frames” that are determined by our immediate goals [Figure 1]. If we want to avoid losing speed, we use one set of heuristics to maximize speed.. If we want to avoid landing out, we use another frame aimed at minimizing the possibility of landing out.

This fits in nicely with the first part of our analysis, where we find that the reliability/spacing of thermals determines a threshold of risk, below which it is impossible to maintain a “safe” level that will work out over the long-run. Once a pilot exceeds the threshold and enters the “risky zone”, he should immediately ameliorate this problem by finding a thermal and climbing (to increase his range and sampling of thermals) or by finding more reliable air.
This sounds a lot like the common notions about “gear-shifting”! This can be done relatively easily, by simply changing one’s priorities. Get into a “risk-minimizing” mindset, run through the program of heuristics and the decision becomes self-evident. You feel good air and it isn’t painful to pay the penalty of searching around for a thermal. You see gliders 90 degrees off course circling under a wisp and there’s hardly any hesitation in joining them.
This contrasts with a “racing” mindset. You are in a thermal and you see another glider bump it below you, charging ahead to another cloud ahead. Doubt settles in, you reassess the sky and realize that the other cloud may have a stronger thermal. Never mind the fact that this is a bit of a gamble, you feel the urge to move on. If the lift is plentiful and reliable, it is only natural that your priority would be to avoid losing speed relative to the other pilot and you would be itching to go. The key insight is that gear-shifting really boils down to choosing either the risk-minimization or racing mindset and this choice selects the algorithm which is used to narrow down the massive number of possible paths to a manageable few.
This model is consistent with both cognitive psychology and the statistical nature of the racing game. Sure, the pictures used to illustrate the examples are rather extreme. It is obvious that in the racing picture, the pilot is in wonderful shape. In the risk-minimization picture, it is clear that the sky looks quite dead and the pilot ought to be quite concerned with landing out. But if you recall the statistics in the first article, it shows that once you cross the risk threshold, you basically fall off the risk cliff. To determine whether or not you are off the cliff, assess whether the lift is reliable and the thermals are plentiful enough, or not. It’s that simple.
Simulations
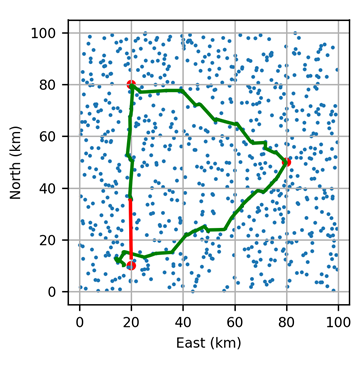
While the statistical and decision-making theories were exciting and useful, we wanted to put these ideas to the test. Unfortunately, it is hard to test these ideas in a controlled manner in the real world. Anecdotally, our model of gear-shifting seemed to work, but we wanted to play with the variables and quantify the costs and benefits. To do so, we used computer simulations. We simulated weather, a pilot flying a Discus 2, and a 220 km triangle task with two turnpoints [Figure 2]. The thermals were randomly populated with a moderate density in this space. The thermal strength was held at a consistent three knots, so any difference in task speed achieved could only be attributed to risk strategy. If a pilot encountered a thermal along his flight path, he climbed in it to cloudbase. We varied the reliability of the thermals, the simulated pilot’s decision frame, and his chosen risk tolerance. The pilot’s risk strategy determined how many clouds he chooses to select on his path; a higher risk tolerance requires fewer clouds.
We modeled two different kinds of path planning strategies, which we called “Racing” and “Risk-Minimization” [Figure 3]. A simulated pilot who follows the Racing strategy plans the minimum number of clouds necessary to satisfy her risk tolerance. She determines this number by assessing the reliability of the clouds ahead and weighing this information in relation to how much risk she is willing to accept on this glide. If she is “aggressive” and has a high risk tolerance, she picks very few clouds to minimize deviations from courseline. After starting her glide, she sticks to her plan even if several clouds do not work along the way. She flies at MacCready speed since she wants to go as fast as possible.
A second pilot can “shift gears” after starting her glide. She can switch into a risk-minimization frame if she fails to find a thermal under a cloud, and there are not enough clouds along the course line to satisfy her risk tolerance. At this point, she reassesses her path, shifts to MC 0 to maximize her range, and accepts larger deviations to maximize the number of clouds to sample. Her risk tolerance will determine how early or late into her glide she shifts into risk-minimization.
With these decision-making strategies, we simulated “reliable” and “unreliable” soaring conditions with 70 percent and 40 percent of the clouds providing thermals respectively. This reliability did not change over the course of a simulated “day”. The simulated pilots knew the reliability of the clouds in the airmass and factored this into their glide planning. We put these pilots out on course, then measured how fast they went and how often they landed out. Computers are wonderful because we could run these scenarios over and over again; we ran this simulation 8000 times!
Results
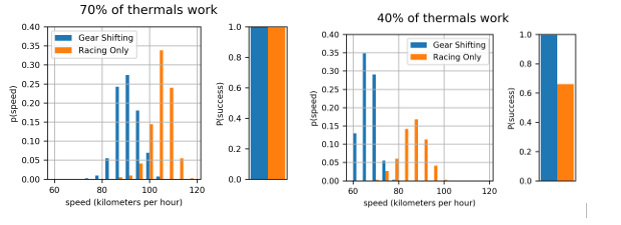
In reliable conditions, the racing pilots do a lot better than the gear-shifters. (Think of sites like TSA or Moriarty, where the thermals are strong, plentiful and reliable) The steely racing pilots land out about three percent of the time whereas the gear-shifters almost always make it around. However, the gear-shifters pay a steep price for this small reduction in risk; they are approximately ten percent slower than the racing pilots [Figure 3]. However, the gear-shifters do a lot better in unreliable conditions. When only 40 percent of the clouds are working, the gear-shifters land out in only three percent of the simulations while the racing pilots land out a mind-boggling 30 percent of the time! [Figure 4]. With such a risk level, the racing pilots are bound to fail in a several day competition.
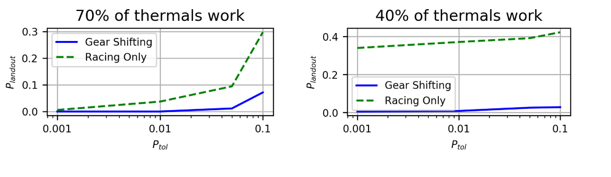
The effect of tweaking risk tolerance depends on the reliability of the conditions. If the clouds are reliable, a racing pilot who adjusts his risk tolerance by adding or subtracting a cloud or two from his path can meaningfully vary his risk exposure [Figure 5]. However, when the conditions are unreliable there is no risk tolerance that meaningfully minimizes risk exposure. It is only by shifting into the risk-minimization mode that the pilot can make a difference in his landout risk [Figure 6].
Interaction of Risk and Reward
Throughout the article so far, we have focused exclusively on risk as a driver of decision making in thermal soaring. From this perspective, behaviors bifurcate into two distinct frames. The existence of these frames is supported by risk-management psychology and the experience of many cross-country pilots who frequently discuss “shifting gears”. Simplifying these behaviors to their cores permits us to determine what effect these frames have on the risk of landing out and on speed, but in some cases these behaviors are not so distinct.
When the objective becomes to maximize speed while completing a contest (rather than exclusively keeping risk below a desired level), the pilot will no longer fly the “pure” version of these frames as we simulated them in our model. In the real world, even when pilots are in a racing frame, they are still somewhat concerned with the risk of landing out. Furthermore, even when pilots are in a risk minimization frame, they will still consider how their choices will affect their speed. With this in mind, we propose a model of decision-making where a pilot chooses a frame (racing or risk minimization) and mentally runs its respective heuristics. Once the algorithm is completed, the pilot will adjust the result depending upon the risk/reward of their tactical situation.
When considering the interaction or risk and reward, the two frames are still relevant, they become a statement of a pilot’s dominant goals. After the pilot decides whether losing efficiency or landing out is more painful, the pilot will tune the dominant frame’s decision to satisfy the secondary objective of minimizing risk or maximizing speed. For instance, if the pilot has two paths available that are nearly equivalent in speed, but one path has more clouds, it is natural that even a pilot in a racing frame may sacrifice a little bit of speed for a path that meaningfully minimizes his risk exposure. On the other hand, if a pilot has two paths available that are nearly equivalent in risk, but one path is faster, it is natural that the pilot would contemplate taking a little bit more risk to meaningfully increase his speed. The place that this “tuning” holds in the decision-making process is depicted schematically in our final model [Figure 8].
Converging and Diverging Decisions
After considering the interaction of risk and reward, the reader may come to the conclusion that risk management can be represented by a single optimal solution which integrates both goals. Indeed, there are many cases when the Racing and Risk-Minimization frames lead to similar solutions. For instance, one pilot may look at a cloud street and see a beautiful energy source which will maximize her speed. Another pilot can see the same cloud street as a great way to minimize his risk exposure on the next glide. If the cloud street is aligned close to course line, both pilots would plan the same path, despite running different algorithms to do so.
However, sometimes the risk minimization and racing frames can lead to distinctly different outputs, even when pilots are tuning their decisions to consider the effects of both risk and reward. Consider a scenario where two pilots see a blue hole ahead and have two options: accept a major deviation to clouds on its perimeter, or make a highly aggressive dash across the middle, with very few clouds on the other side. The pilot in the “racing” frame charges across the blue hole whereas the pilot in the “risk minimization” frame deviates around it in order to limit his risk exposure.
In such a case, the “racing” pilot may tune her output by flying somewhat slower across the blue hole to arrive at the other side at a greater altitude to reach more potential thermals. The risk minimizing pilot may tune his output by accepting a somewhat more direct path with slightly fewer clouds and flying closer to the MacCready speed than in the “pure” version of his frame. Even with this tuning, the two pilots are still taking very different approaches to the same challenge. When confronted with a situation where racing and risk minimization yield very different outputs, it is paramount to choose the right frame. It is in such cases that pilots can blow through really important strategic situations. For instance, if a pilot blindly follows a “racing” frame when he approaches that blue hole, the failure to shift may lead to an unacceptably high chance of landing out. And if he does land out, he may feel like he did “everything right” and simply “got unlucky”. But in reality, he failed to shift gears at a critical junction.
Conclusions
Risk management is an essential part of thermal soaring, but it often isn’t discussed in a rigorous way. Previously, we explored what is an appropriate level of risk on each glide, and how to assess that risk from the cockpit. The acceptable level of risk is very small, motivating the need for a way to manage situations where the risk has risen to an unacceptable level (either through pilot inattention or changing soaring conditions).
We propose that “gear shifting” is a means to manage situations where the risk of landing out has risen above the “strategic baseline.” Unfortunately, we know of no formal definition of gear shifting, so we propose that gears are defined by a pilot’s dominant goals. When losing speed is a pilot’s primary concern, the pilot is “racing”. When the concern for landing out dominates, the pilot is “risk minimizing”.
Monte Carlo simulations of pilots executing tasks in different conditions and using different risk strategies demonstrate that gear shifting can be used to significantly reduce a pilot’s risk exposure if he shifts frames when his risk tolerance is violated. We note that shifting gears carries an efficiency penalty as it requires greater deviations and slower speeds to maximize the number of clouds to sample.
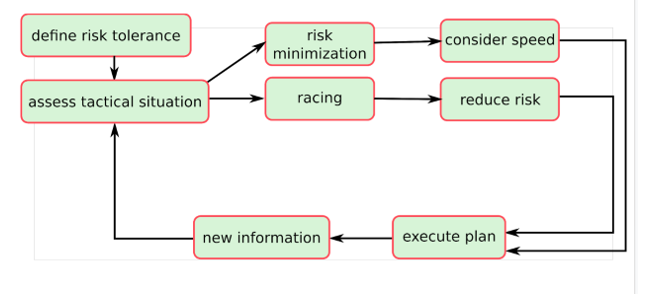
The steps outlined in this article and illustrated in Figure 7 constitute a cognitive model for managing risk in thermal soaring. Assessing the level of risk, choosing a decision-making frame, tuning the dominant frame, and looking for new information while carrying out a flight plan forms a loop similar to the famous “OODA” loop for decision making. While individual pilots may use different heuristics as they progress through this loop, the structure provides a systematic approach to evaluating and managing risk in thermal soaring. From the results of this investigation, the authors recommend several heuristics that can be applied by pilots in the cockpit to improve their thermal soaring performance.
- The risk of landing out in a competition is extremely sensitive to the risk taken on each glide. The acceptable risk of landing out on each glide must be very small to complete a competition successfully.
- If more than half of the clouds are working, a pilot can become more selective about thermal choices. If fewer than half of the clouds work, conservatism is required to avoid landing out.
- Improvements in thermal “hit” probability can dramatically improve speed and reduce risk.
- Having strong confidence in at least one lift source ahead greatly diminishes risk exposure on the current glide. When assessing a tactical situation, ask yourself “should I be more concerned with speed or landing out.”
- In reliable conditions, a racing frame can be maintained with relatively few options. A low risk tolerance costs little in speed while reducing the risk of landing out.
- In unreliable conditions, shifting to risk minimization early can significantly reduce the risk of landing out.
